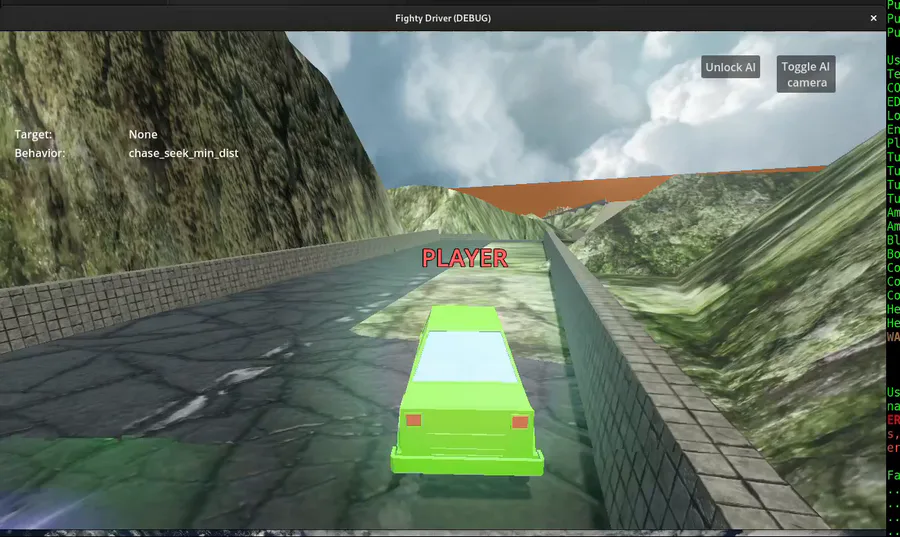



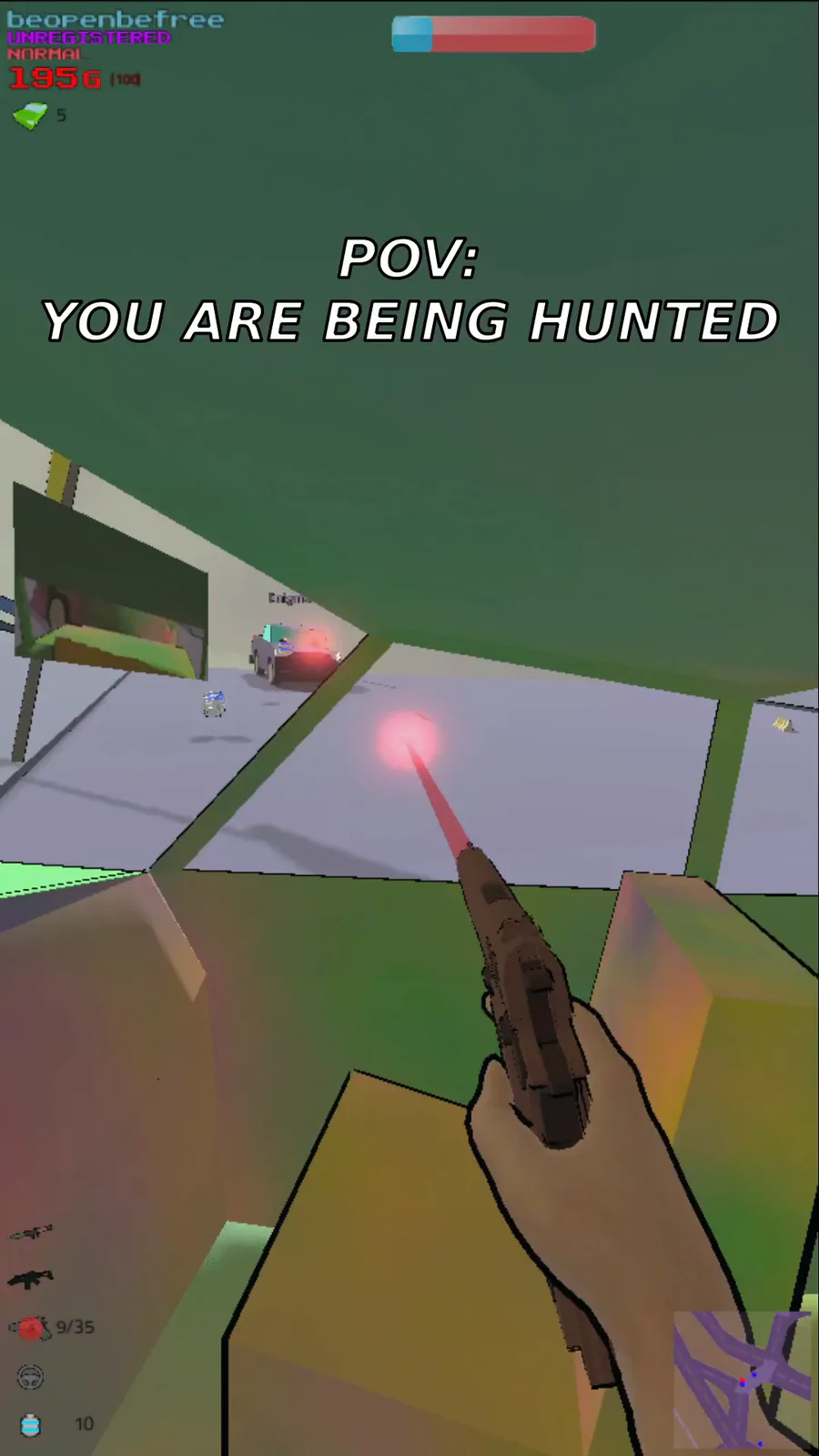
Ok, the behavior of the AI-driven vehicles is not perfect! But if we consider that path finding, obstacle avoidance, solving motion blocks etc.,,, are handled only by the lowest level, the movement level (i.e. the infamous steering behaviors), I can be quite satisfied! The upper level (the decision making level) is currently used only to choose the next target, while it can also be used to solve more complex blocking situations.
I also managed to reduce the AI update rate to 2 times per second, getting a quite believable behavior and a satisfactory performance increase!
Well, there are still many things to do, but today I am satisfied with the results, and all this thanks to the debug environment! 












2 comments